序号 | 实验平台和主要部件名称 | 图片 | 详细功能 |
1 | 近海航运无线通信平台 |
| 平台采用场景化、沉浸式教学模式,进行交互呈现,全面提高学生实验兴趣。让学生以搭建一个近海航运无线网络覆盖的具体场景、以项目管理模式牵引学生由浅及深的掌握近海航运无线网络架构及关键技术、网规网优、传输及网络建设及近海航运无线通信系统的项目部署。 主要包含近海航运无线通信网络部署模块、近海航运无线通信网络开通模块、近海航运无线通信网络优化模块、近海航运无线通信工程实践模块等4个模块。 |
2 | 港口及船舶智能信息化工程教学平台 |
| 让学生以搭建一个港口及船舶网络工程的场景、以项目管理模式牵引学生由浅及深的掌握港口及船舶网络工程的架构及关键技术、网规网优、传输及网络建设。主要包含港口及船舶智能信息化工程虚拟教学显示系统、港口及船舶智能信息化工程实践教学沙盘、港口智能信息化工程仿真教学系统、船舶智能信息化工程仿真教学系统。 |
3 | 海上多通道无线通信教学系统 |
| 以项目管理模式牵引学生由浅及深的掌握船舶无线通信技术及船舶传感器技术。 |
4 | 视频信息智能化分析及处理平台 |
| 包含定制的高清摄像头共5路用于室内不同信号采集,并采用多功能检测与分析模块,比对识别模块进行船员、船舶等目标的各类智能行为分析、安全管理。实现的智能化分析实训类项目主要分4类:1)针对人员目标:可针对性提供指定时段指定区域人员进入识别、徘徊等行为分析;2)针对人员特征:可针对性提供人员戴安全帽识别或穿戴安全服识别等标志特征识别。3)针对人员头部目标:可针对性提供驾驶人员疲劳专注检测数据,包含打哈欠检测、闭眼检测等人员状态识别。4)针对人脸特征:建立人脸库,可提供人脸抓拍、人脸比对数据等人脸特征捕捉识别。 |
5 | 态势感知实验教学无人船 |
| 包含3m左右双体自主航行无人船(包含导航设备(北斗、IMU)),全电力驱动,挂载激光雷达、双目视觉(包含GPU算力平台)。配备多源感知融合智能分析处理系统,以无人艇为载体,利用点云处理、图像处理、目标识别等技术获取目标物信息及做信息融合,从而获得周围环境的实时状态,实现自主航行、远程遥控、多船协同、自动避障、环境感知、数据管理等功能。提供算法示例,包括MATLAB和C/C++或python等语言实现,指导实验室使用和二次开发。更全面的培养学生将所学的相关专业课程知识运用于各类智慧航运领域的能力,为将来从事智慧航运领域高端设备的科研与生产打下基础。 |
6 | 智慧航运船舶信息处理实验系统 |
| AIS数据接收;AIS数据处理;数据存储;数据显示;雷达回放;ArcGIS地图服务等 |
7 | 智慧航运船舶海上通讯实验系统 |
| 发射电路实验箱;接收电路实验箱 |
8 | 云实验平台 |
| 云实验平台系统以应用型人才培养目标为出发点,面向人工智能等相关专业,为《机器学习》、《海洋大数据技术》、《Python程序设计》等课程提供了教学实验资源,可供几十名学生同时进行相关。 |
9 | 智能网联系统开发实训平台 |
| 该平台用于学生了解Maven集成人体分SDK与创建应用 、修改APP认证信息 、实现手势识别 、测试手势识别 ,且集成Camera实时进行手势识别监控; |
10 | 教学实训平台 |
| 该教学实训平台提供了智能交运相关的交通数据可视化等实训项目资源。 |
11 | 自动驾驶环境感知模拟台架 |
| 自动驾驶环境感知模拟台架集成了激光雷达、毫米波雷达、视觉传感器、超声波雷达和惯性测量单元(IMU)等智能网联汽车关键传感器,主要进行传感器的安装调试、数据解析、功能应用、数据采集、故障检测等实训。 |
12 | 自动驾驶原型车套件 |
| 自动驾驶原型车套件是满足教学、实验与科研需求的实车平台,车上搭载激光雷达、摄像头、组合导航、毫米波雷达、超声波雷达等自动驾驶常用传感器,并配套相应的自动驾驶软件及实验课程,能够将建图定位、环境感知、 决策规划、车辆控制等主要技术进行模块化分解,使自动驾驶相关技术能够完整的在实验室展现,使学生了解自动驾驶的原理及应用,系统的掌握整车传感器的安装、调试与标定。 |
13 | 网络版水声通信机 |
| 水声通信机具有小型化、低功耗、多模、高速率等特点,能够满足水下用户不同的报文、图像、语音等数据无线传输需求,能够将水下工作的海洋仪器/水下传感器所获得的数据通过水声通信方式实时传输到水面,可应用远程采集水下传感器数据,水下潜器远程遥控、海底观测网、水下通信网络等建设。 |
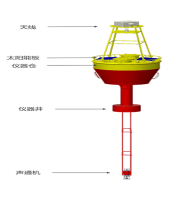
14 | 智能浮标系统 |
| 部署在我校智慧湖,具有水面和水底数据采集和传输功能。浮标主要配置有浮标主体、蓄电池、太阳能电池板,太阳能控制器、浮标主控模块、RTK GPS模块等。浮标可挂载各类传感器,可提供常规的通讯接口若干个,并预留水声通信机接口。 |
15 | 岸基平台主控浮标 | 部署在我校智慧湖近岸,是外场试验平台的主控节点,除具备智能浮标系统的全部功能外,还作为系统中心节点实现对各浮标系统设备及水声网络和水面无线网络的联动控制。 | |
16 | CTD传感器 |
| 在外场试验平台1期建设的三个水下传感网络平台节点的基础上,完善外场水下传感网络平台的水下参数采集传输功能。可支撑水下环境监测数据采集与处理、海洋信息智能感知性能评估与优化、水下多元\源数据融合算法设计等实验教学和研究。 |
17 | 水声超短基线通信定位基站 |
| 建设水声定位系统,包括1台基站和3台信标,完善外场试验平台的水下空间坐标定位能力。可支撑水下传感数据三维空间数据库映射算法设计、水下资产高精度定位与找回、水下分布式传感节点的协同感知等实验教学和研究。 |
18 | 水声通信定位信标 | 水下节点集成水声通信定位信标后支持水下目标定位,从而将水下观测数据与水下空间位置信息相关联,且可与水下移动节点集成,使外场试验平台可扩展支持水下移动观测节点,开展水下机器人定位导航、自主作业等创新设计实验。 |